

Objectives
- Rediseñar el dispositivo para cumplir con las directivas aplicables para obtener un futuro marcado CE del mismo y poder llevar a cabo su experimentación clínica. Según las recomentadcione de los servicios de consultoría se realizarán las medidas correctivas necesarias para cumplir con las directivas 2006/42/CE relativa a la compatibilidad electromagnética.
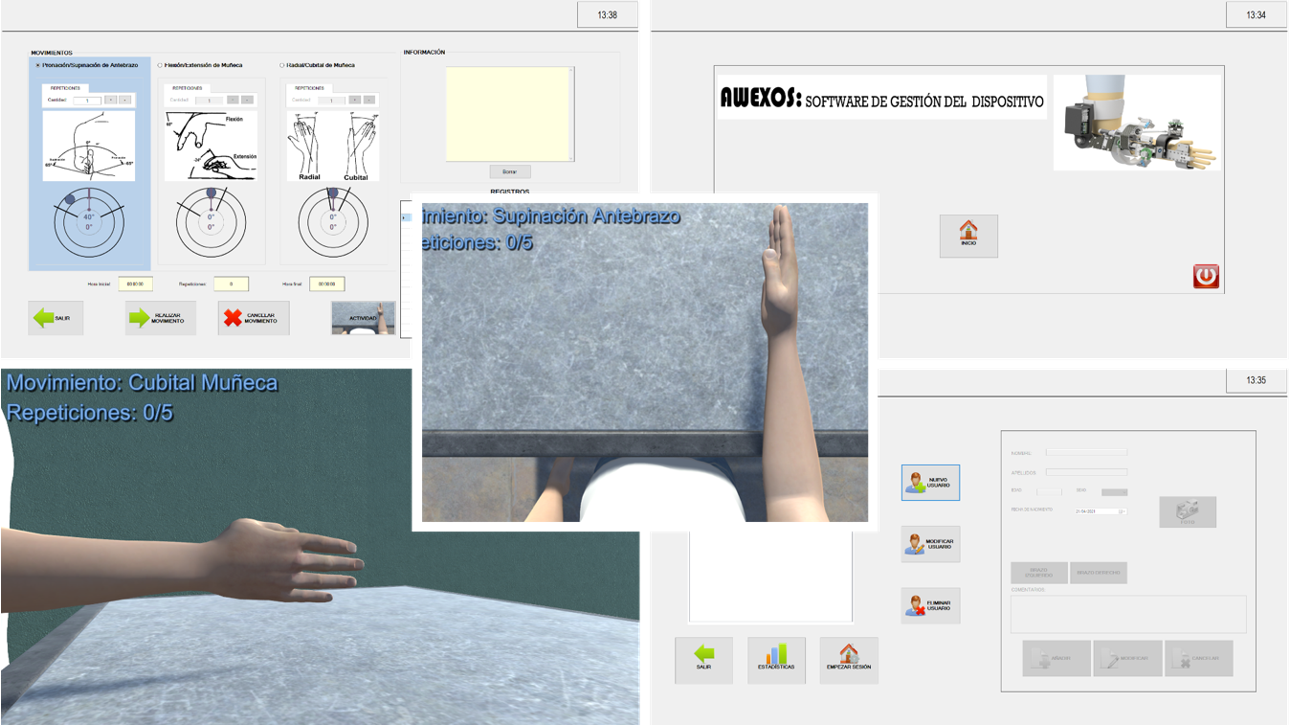
- Adaptar y desarrollar el software de control del dispositivo, el sistema de interface con el usuario y el sistema de monitorización de terapia.
- Llevar a cabo sesiones de experimentación con pacientes crónicos con supervision técnica y clímica para alcanzar un nivel de madurez de la tecnología (TRL7-8).
Workplan
1. Análisis de los requisitos a cumplir por el dispositivo robótico para satisfacer las normas de seguridad y compatibilidad electromagnética.
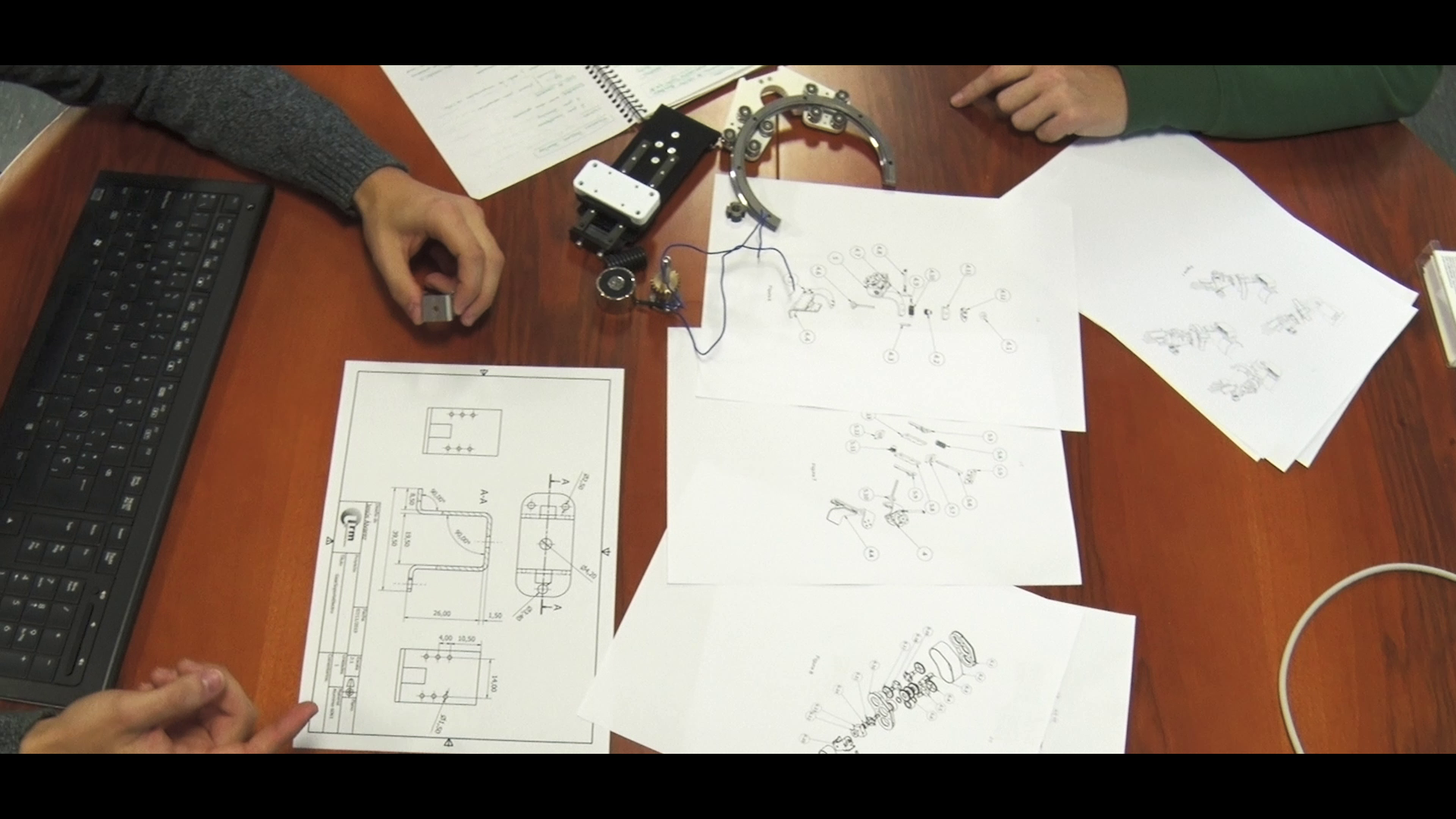
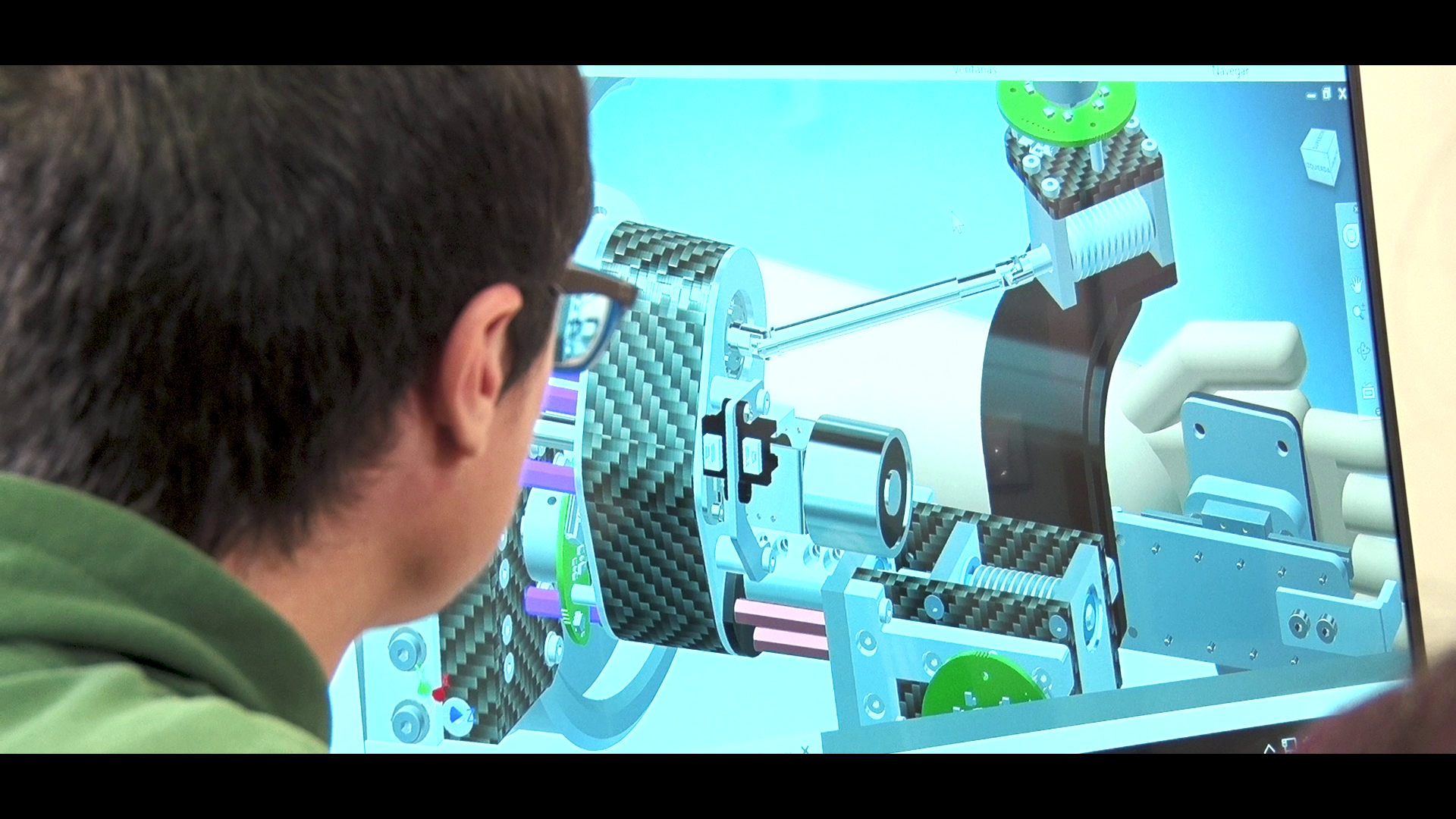
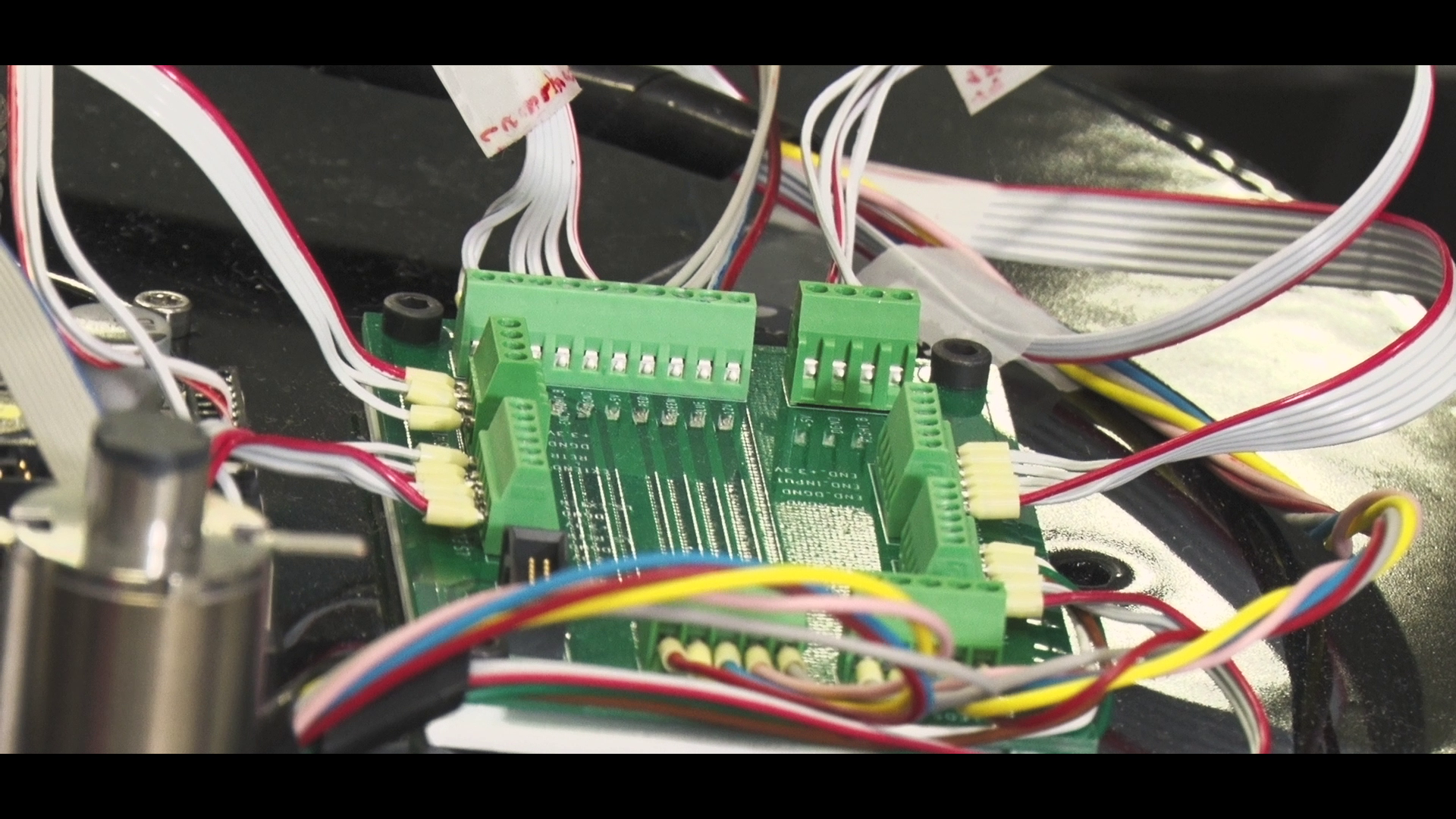
2. Rediseño del dispositivo.

3. Desarrollo del software del dispositivo.
4. Test experimentales en el laboratorio.
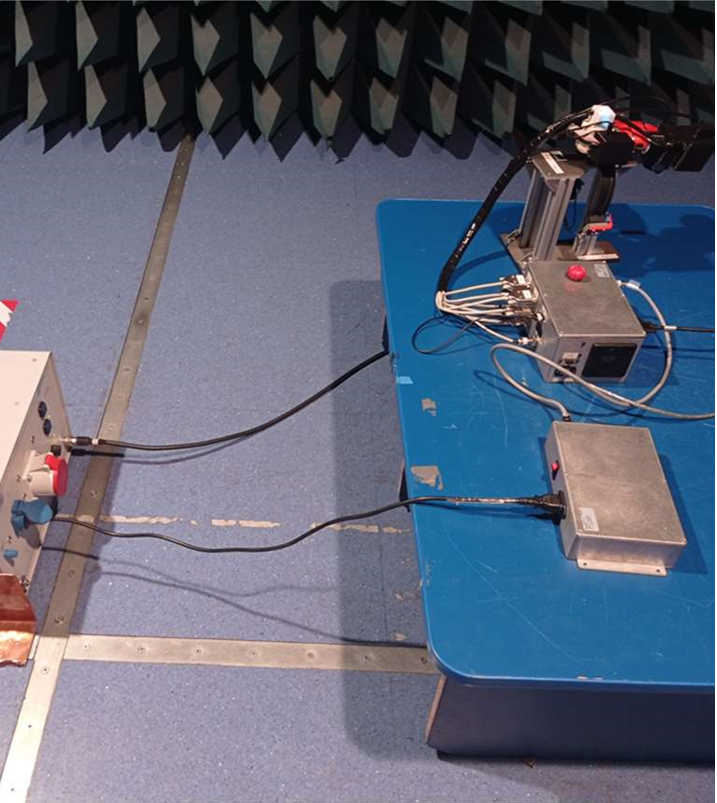
5.Ensayos de compatibilidad electromagnética y de seguridad.
6. Test de usabilidad y experimentación con pacientes.

7. Difusión de resultados en los sectores clave.
